Smart sensor: BHI160BP

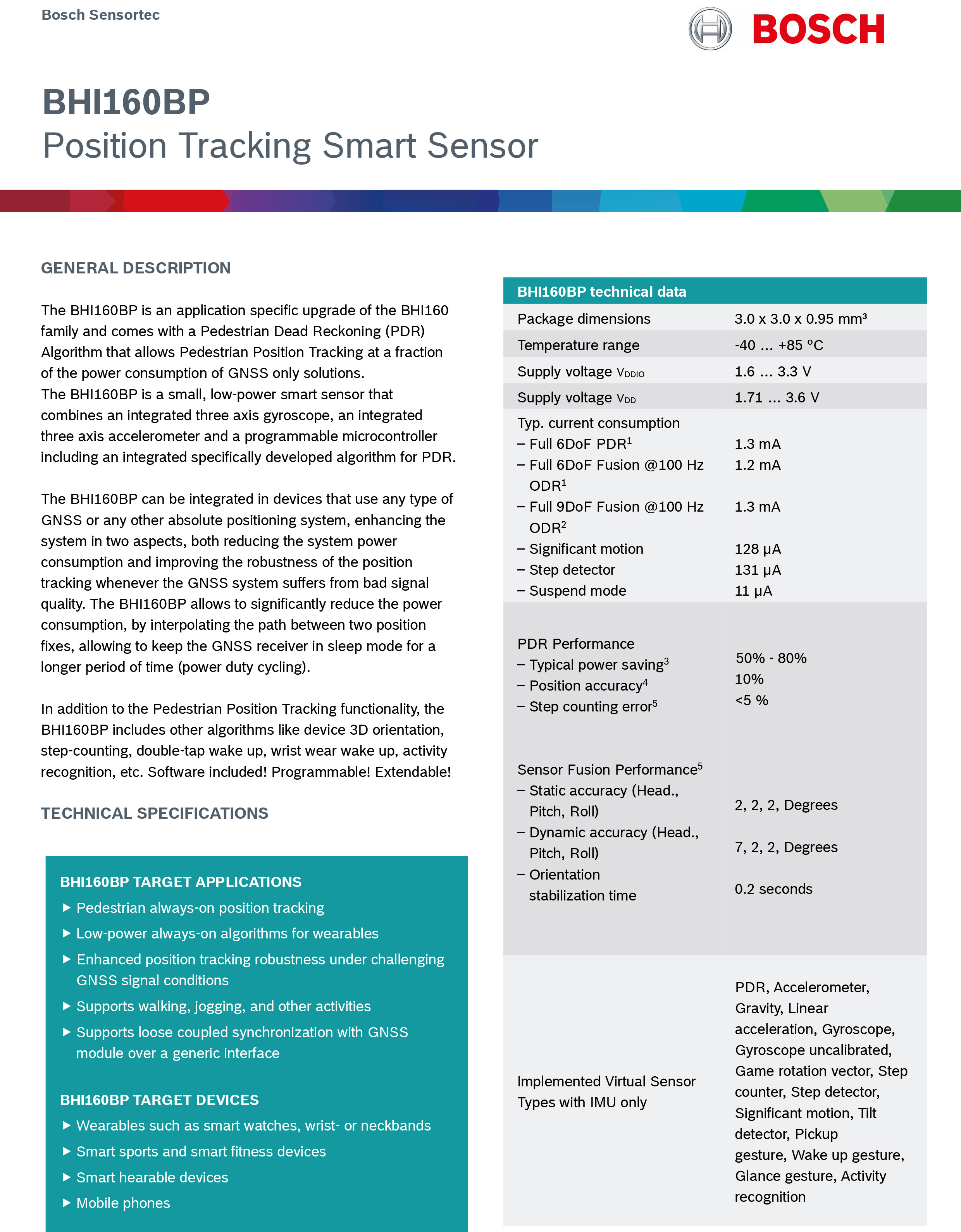
The BHI160BP position tracking smart sensor is an application specific upgrade of the BHI160 family and comes with a Pedestrian Dead Reckoning (PDR) Algorithm that allows Pedestrian Position Tracking at a fraction of the power consumption of GNSS-only solutions.
- Low power pedestrian position tracking sensor
- Integrated data sensor fusion and PDR
- Integrated IMU
Technical data
Package dimensions
3.0 x 3.0 x 0.95 mm³
Temperature range
-40 °C ... +85 °C
Supply voltage (VDDIO)
1.6 … 3.3 V
Supply voltage (VDD)
1.71 … 3.6 V
Typ. current consumption
– Full 6DoF PDR¹
– Full 6DoF Fusion @100 Hz ODR¹
– Full 9DoF Fusion @100 Hz ODR²
– Significant motion
– Step detector
– Suspend mode
– Full 6DoF PDR¹
– Full 6DoF Fusion @100 Hz ODR¹
– Full 9DoF Fusion @100 Hz ODR²
– Significant motion
– Step detector
– Suspend mode
1.3 mA
1.2 mA
1.3 mA
128 µA
131 µA
11 µA
PDR Performance
– Typical power saving³
– Position accuracy⁴
– Step counting error
– Typical power saving³
– Position accuracy⁴
– Step counting error
50% - 80%
10%
<5 %
Sensor Fusion Performance⁵
– Static accuracy (head., pitch, roll)
– Dynamic accuracy (head., pitch, roll)
– Calibration time
– Orientation stabilization time
– Static accuracy (head., pitch, roll)
– Dynamic accuracy (head., pitch, roll)
– Calibration time
– Orientation stabilization time
2, 2, 2, degrees
7, 2, 2, degrees
<1 second
0.2 seconds
Implemented virtual sensor types with IMU only
PDR, accelerometer, gravity, linear acceleration, gyroscope, gyroscope uncalibrated, game rotation vector, step counter, step detector, significant motion, tilt detector, pickup gesture, wake up gesture, glance gesture, activity recognition
² With attached Magnetometer
³ 50% till 80% are the typical values of system power saving for standard user walking profile andsystem including typically available GNSS module characteristics. Actual power saving usually vary depending on the application and GNSS module.
⁴ Relative position estimation error for 75% of the population of various user profiles and movement profiles (walking, jogging, standing still, etc.) will have a typical error of 10% or better relative to the walked distance. This is the relative error of the BHI160BP PDR algorithm without GNSS assistance.
⁵ Performance measured for 9DOF solution (with attached magnetometer BMM150).








准备好更深入探索我们的传感器世界了吗?
与我们的开发者社区建立联系,分享您的专业知识,共同探索传感器技术的最新成果。立即加入 Bosch Sensortec 社区,并获取独家资源、洞见和讨论