智能传感器:BHI160B

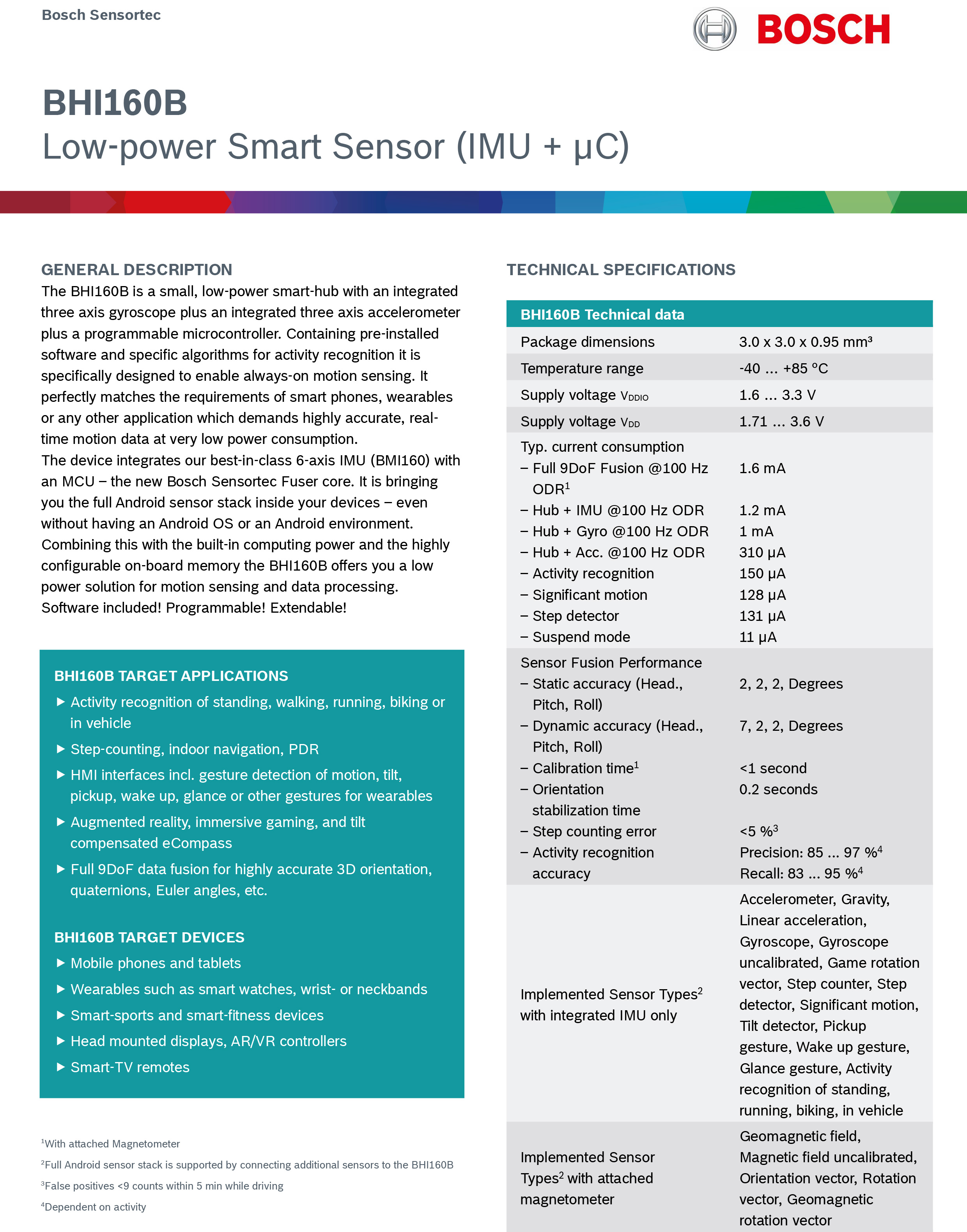
BHI160B是一款小型低功耗智能传感器,集成三轴陀螺仪、三轴加速度计及微控制器。它预装了活动识别的软件和算法,专为持续运动感知设计。
- 低功耗智能传感器
- 集成数据传感器融合
- 高度准确
不建议用于新设计
技术数据
封装尺寸
3.0 × 3.0 × 0.95 mm³
温度范围
-40 °C ...+85 °C
电源电压(VDDI0)
1.6 V … 3.3 V
电源电压(VDD)
1.71 V ...3.6 V
微控制器Bosch Sensortec“fuser core”
运行频率为10 MHz的32位浮点ARC EM4 MCU
1.6 DMIPS/MHz性能,3.41 CoreMarks/MHz
96 kByte ROM,48 kByte共享RAM,用于FIFO、功能和扩展
针对超低功耗传感器数据融合进行了优化
1.6 DMIPS/MHz性能,3.41 CoreMarks/MHz
96 kByte ROM,48 kByte共享RAM,用于FIFO、功能和扩展
针对超低功耗传感器数据融合进行了优化
电流消耗典型值
- 全9DoF融合(100 Hz ODR¹)
- 中枢 + IMU (100 Hz ODR)
- 中枢 + 陀螺仪(100 Hz ODR)
- 中枢 + 加速度计(100 Hz ODR)
- 活动识别
- 显著运动
- 步进探测器
- 挂起模式
- 全9DoF融合(100 Hz ODR¹)
- 中枢 + IMU (100 Hz ODR)
- 中枢 + 陀螺仪(100 Hz ODR)
- 中枢 + 加速度计(100 Hz ODR)
- 活动识别
- 显著运动
- 步进探测器
- 挂起模式
1.6 mA
1.2 mA
1 mA
310 μA
150 μA
128 μA
131 μA
11 μA
传感器融合性能
- 静态精度
- 动态精度
- 校准时间¹
- 方向稳定时间
- 计步错误
- 活动识别准确性
- 静态精度
- 动态精度
- 校准时间¹
- 方向稳定时间
- 计步错误
- 活动识别准确性
[航向、俯仰、横滚] = 2、2、2度
[航向、俯仰、横滚] = 7、2、2度
<1秒
0.2秒
<5%³
精度:85...97%⁴ 调用率:83...95%⁴
[航向、俯仰、横滚] = 7、2、2度
<1秒
0.2秒
<5%³
精度:85...97%⁴ 调用率:83...95%⁴
已实现的仅集成IMU的传感器类型²
加速度计、重力、线性加速度、陀螺仪、未校准陀螺仪、游戏旋转矢量、计步器、步进检测器、显著运动、倾斜检测器、拾取手势、唤醒手势、扫视动作,以及站立、跑步、骑行、车内活动识别
已实现的附带磁力计的传感器类型²
地磁场、未校准磁场、方向矢量、旋转矢量、地磁旋转矢量
² 通过将附加传感器连接到BHI160,可支持完整的Android传感器堆栈
³ 驾驶期间5分钟内误报次数小于9次
⁴ 依赖于活动