智能传感器:BHI260AB
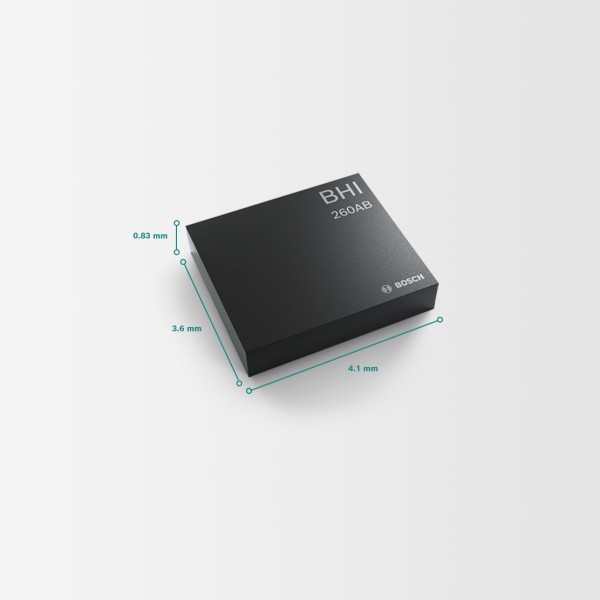

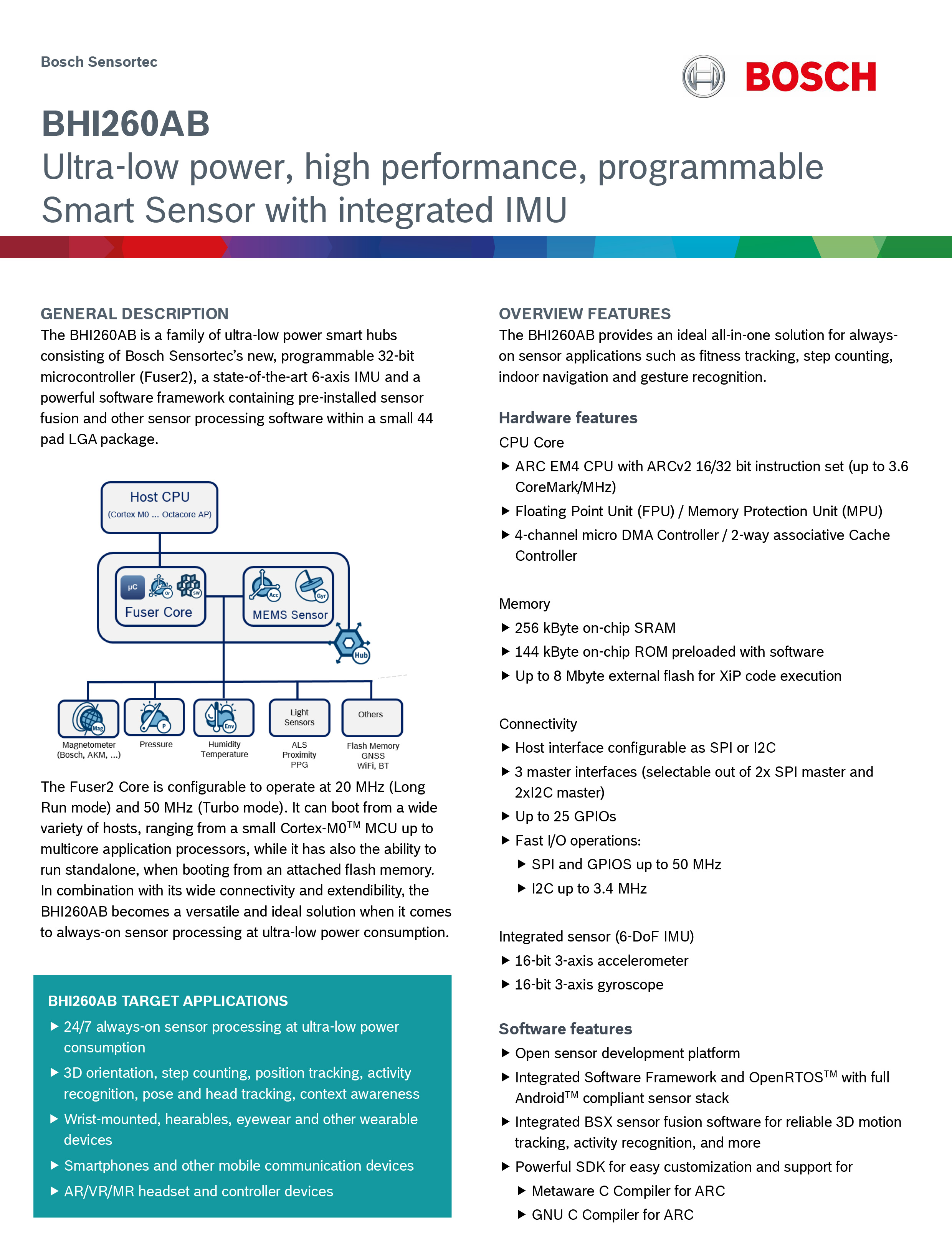
BHI260AB是一款超低功耗智能传感器,由Bosch Sensortec新型定制可编程32位微控制器(Fuser2)、先进的六轴IMU以及集成了预装传感器融合算法和其他传感器处理软件的强大软件框架构成,专为实现持续运动感知而设计。
- 低功耗智能传感器
- 集成式传感器数据融合
- 定制可编程
| In stock | |||
|---|---|---|---|
|
|
Out of stock | 0 pieces | Not available |
|
|
Out of stock | 0 pieces | Not available |
|
|
Out of stock | 0 pieces | Not available |
|
|
Out of stock | 0 pieces | Not available |
|
|
Out of stock | 0 pieces | Not available |
技术数据
工作电压
1.8 V
电流消耗
Fuser2(运行CoreMark)
– 长时间运行模式(20 MHz)
– Turbo模式(50 MHz)
传感器融合(Hub+IMU)运算(计算游戏旋转向量)
– 800 Hz ODR
– 100 Hz ODR
待机电流
Fuser2(运行CoreMark)
– 长时间运行模式(20 MHz)
– Turbo模式(50 MHz)
传感器融合(Hub+IMU)运算(计算游戏旋转向量)
– 800 Hz ODR
– 100 Hz ODR
待机电流
950 µA
2.8 mA
1.2 mA
1.0 mA
8 µA
传感器融合性能
– 静态精度(航向、俯仰、横滚)
– 动态精度(航向、俯仰、横滚)
– 校准时间
– 方向稳定时间
2、2、2度
7、2、2度
<1秒
0.2秒