Smart sensor: BHI260AB
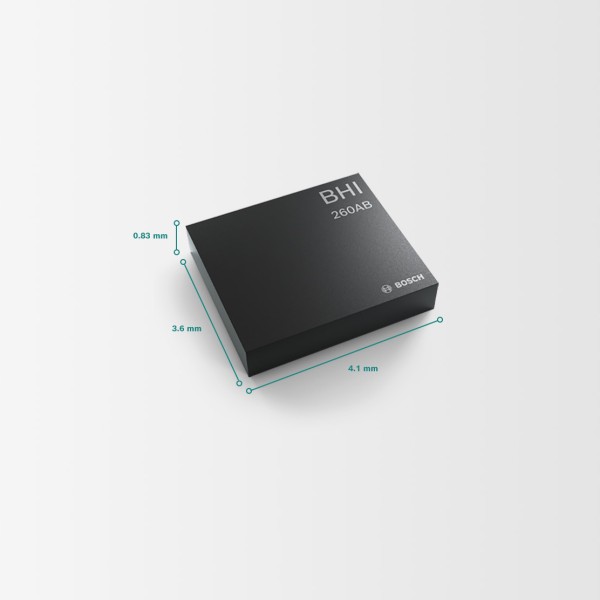

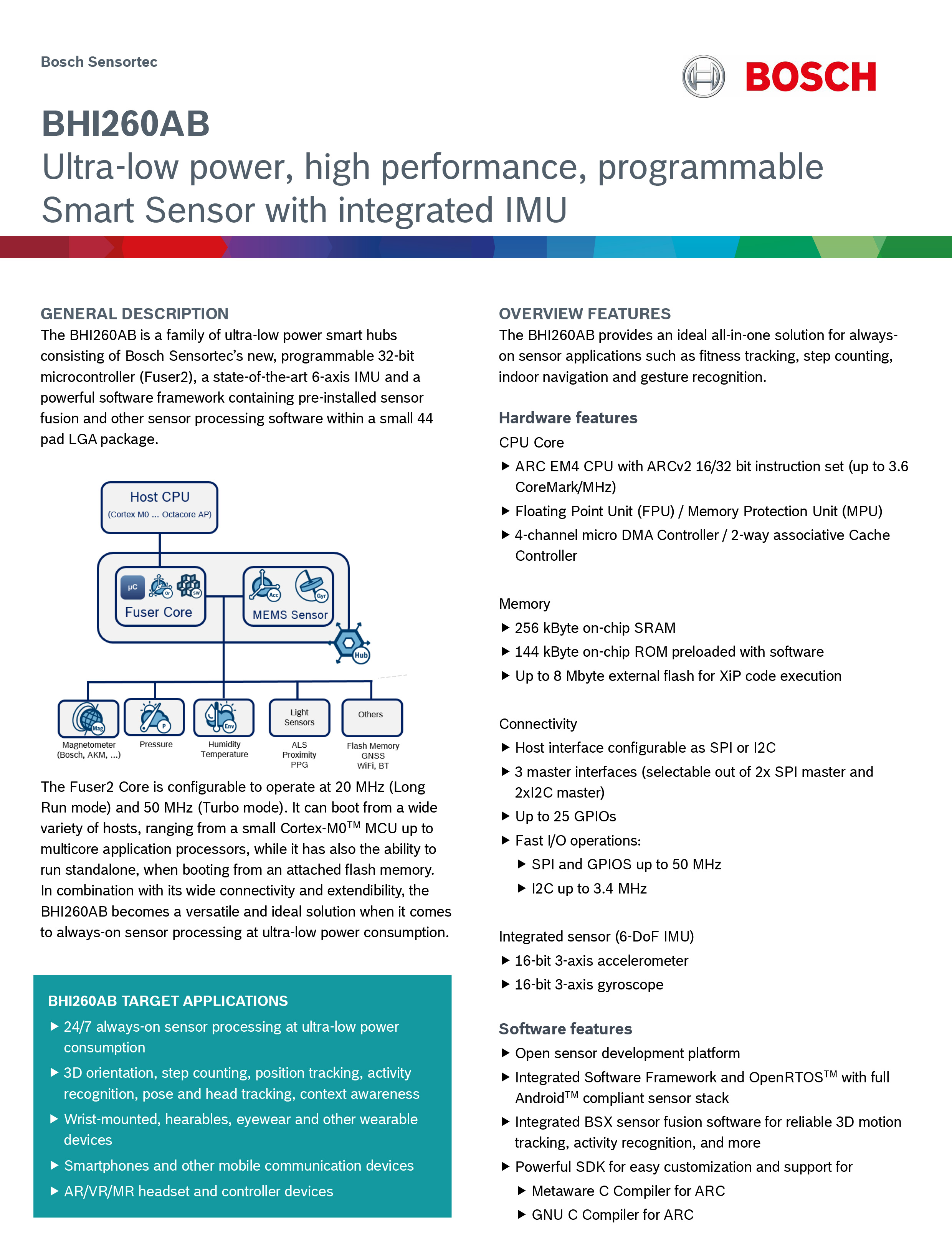
The BHI260AB is an ultra-low power smart sensor consisting of Bosch Sensortec’s new, custom programmable 32-bit microcontroller (Fuser2), a state-of-the-art 6-axis IMU and a powerful software framework containing pre-installed sensor fusion and other sensor processing software and it is specifically designed to enable always-on motion sensing.
- Low power smart sensor
- Integrated sensor data fusion
- Custom programmable
| Order | |||
|---|---|---|---|
|
|
Out of Stock | 0 pieces | Not available |
|
|
Out of Stock | 0 pieces | Not available |
|
|
Out of Stock | 0 pieces | Not available |
|
|
Out of Stock | 0 pieces | Not available |
|
|
Out of Stock | 0 pieces | Not available |
Technical data
Operating voltage
1.8 V
Current consumption
Fuser2 (running CoreMark)
– Long Run mode (20 MHz)
– Turbo mode (50 MHz)
Sensor fusion (Hub+IMU) operation (calculating game rotation vector)
– 800 Hz ODR
– 100 Hz ODR
Standby current
Fuser2 (running CoreMark)
– Long Run mode (20 MHz)
– Turbo mode (50 MHz)
Sensor fusion (Hub+IMU) operation (calculating game rotation vector)
– 800 Hz ODR
– 100 Hz ODR
Standby current
950 µA
2.8 mA
1.2 mA
1.0 mA
8 µA
Sensor fusion performance
– Static accuracy (head., pitch, roll)
– Dynamic accuracy (head., pitch, roll)
– Calibration time
– Orientation stabilization time
2, 2, 2 degrees
7, 2, 2 degrees
<1 second
0.2 seconds